
2013 first robotics Competition: Ultimate Ascent
|
|
What is Ultimate ascent?Ultimate Ascent is a modification of disk golf. Below is a graphical layout of the playing field.
Two alliances consisting of three robots each will face off on a 27x54 ft. field in a 2 minute and 15 second time frame. The first 15 seconds are used for the autonomous period where the teams' robots function free from manual control to score extra points. This period relies solely on the coding done by our programmers. The robots return to manual control by our drivers for the remaining 2 minutes, transitioning to the teleop stage.
|
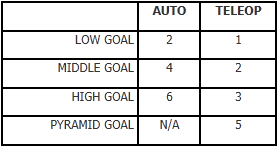
Ultimate Ascent ScoringThe objective of the game is to score as many frisbees as possible in the 5 existing goals: One low goal, two medium goals, one high goal, and one pyramid goal. Pyramid goals can only be scored by colored frisbees, corresponding to the pyramid color appointed to the two alliances, are shot into the chains at the top of the pyramid. Scoring in both the autonomous and teleop stages are shown below:
|
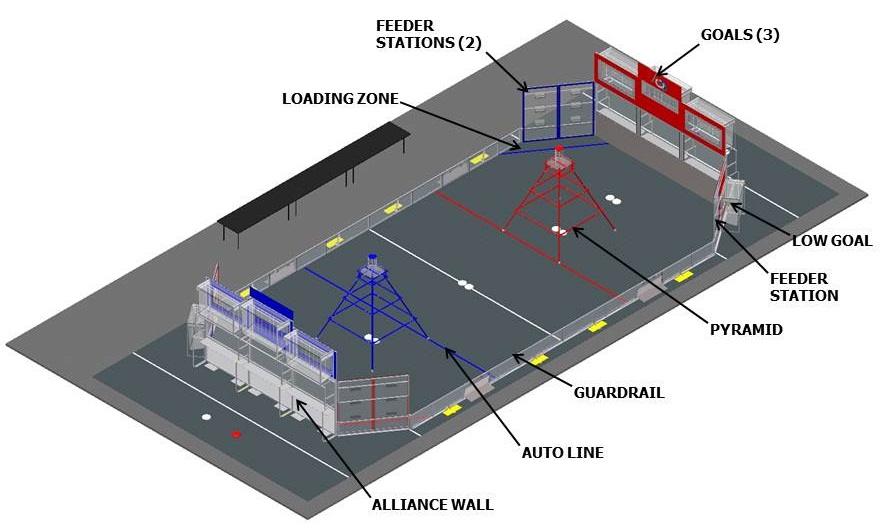
The FieldShown below is an illustrated version of the field this year for the competition. To enlarge, click on the image.
|
|
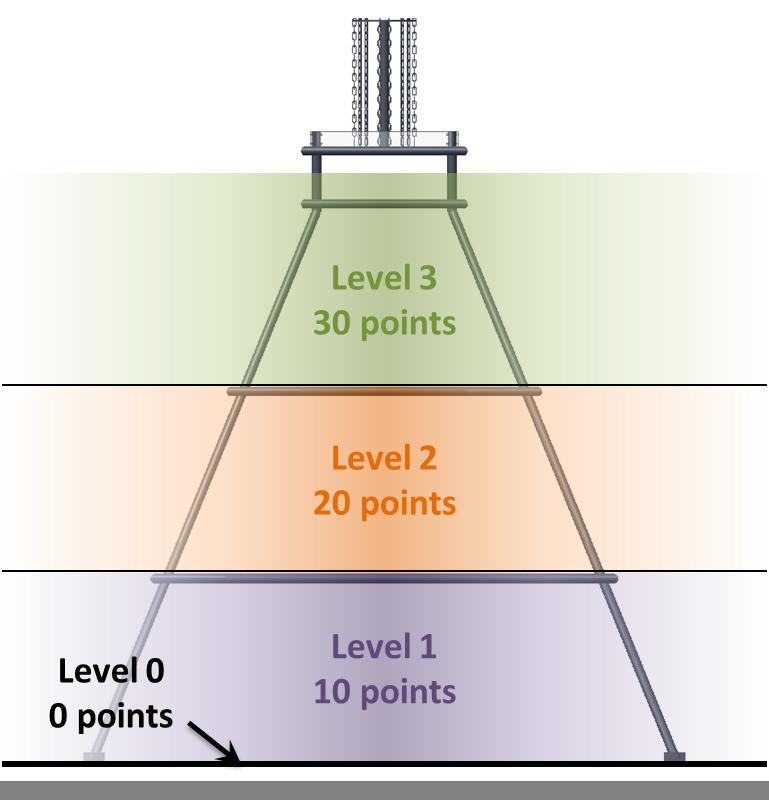
The PyramidsMounting the robot on the designated pyramid rungs before the match ends awards bonus points. The robot must be completely contained within the level boundaries to be awarded the designated points. The zone boundaries with their corresponding point values are shown to the right. To enlarge, click on the image.
Additional regulations and manuals can be found here
|
Visit the Gallery!
If you would like to see pictures of the team throughout the entire 2013 season, be sure to visit the Ultimate Ascent album in the gallery.
|
Images cited from the FRC Ultimate Ascent manual.
|
Greater Kansas City Regional 2013This year our team competed in the 2013 FIRST Robotics Competition in the Greater Kansas City Regional. We were very grateful to all of our mentors who were able to make this a successful season. Our 2013 team was composed of a total 25 students and 13 mentors. Our drive team consisted of senior Charlie Schmidt, junior Philip Ruo, and sophomore Denzel Richmond. We had a great time at competition and look forward to apply our experiences in the years to come!
|
Competition SummaryOn the first day of competition, practice schedules were given to teams. This gave us an opportunity to practice with our robot before the official game. During the morning we found minor flaws in our robot and struggled to pass inspection. Once those issues were solved, we were able to continue tweaking our pneumatic system before competing. Our robot was ready to compete by afternoon in some practice rounds against the other robots.
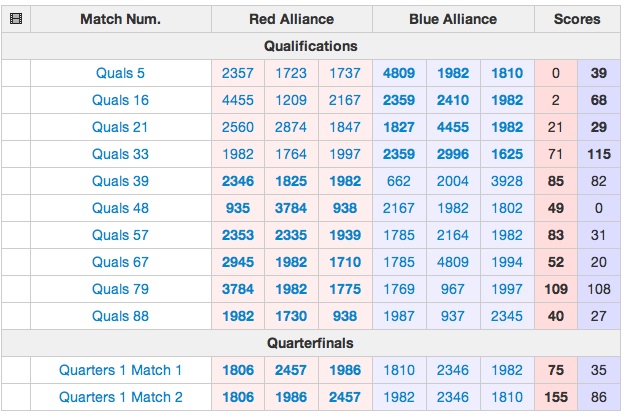
On March 15th the official qualification rounds began. We began scouting with our own team-made template. This part of competition is vital to the team's success, giving our drivers an idea of who they are up against and specific strategies to utilize in the final rounds. On Friday we won the majority of our matches, leaving us at 21st place. The next morning we finished the rest of our qualification rounds before alliance selection. We managed to bring our standing up to 13th place which greatly improved our chances. Fortunately we were chosen by the eighth seat in the competition and made it to the final bracket. In our first two rounds we were put up against the first seat of Team Titanium (robot 1986). They had already won the Hub City Regional and ended up winning the Greater Kansas City Regional. Our defeat occurred in the quarter-finals making us a worthy adversary, given our season's efforts. |
Visit our Gallery!Would you like to see more about what our team did this season? Visit our 2013 Action Gallery to see all the pictures we've taken throughout the season!
|
