
What is Logo Motion?
Logo Motion is played by two competing alliances on a flat 27’ x 54’ foot field. Each alliance consists of three robots. They compete to hang as many inflated plastic shapes (triangles, circles, and squares) on their grids as they can during a 2 minute and 15 second match. The higher the teams hang their game pieces on their scoring grid, the more points their alliance receives.
The match begins with one 15-second Autonomous Period in which robots operate independently of driver inputs and must hang Ubertubes to score extra points. For the rest of the match, drivers control robots and try to maximize their alliance score by hanging as many logo pieces as possible. Any logo piece hung on the same peg as an Ubertube receives double points. If teams assemble the logo pieces on their scoring grids to form the FIRST® logo (triangle, circle, square, in a horizontal row in that order), the points for the entire row are doubled.
The match ends with robots deploying minibots, small electro-mechanical assemblies that are independent of the host robot, onto vertical poles. The minibots race to the top of the pole to trigger a sensor, and earn additional bonus points.
Information provided by www.usfirst.org, the FIRST Organizations main website.
The match begins with one 15-second Autonomous Period in which robots operate independently of driver inputs and must hang Ubertubes to score extra points. For the rest of the match, drivers control robots and try to maximize their alliance score by hanging as many logo pieces as possible. Any logo piece hung on the same peg as an Ubertube receives double points. If teams assemble the logo pieces on their scoring grids to form the FIRST® logo (triangle, circle, square, in a horizontal row in that order), the points for the entire row are doubled.
The match ends with robots deploying minibots, small electro-mechanical assemblies that are independent of the host robot, onto vertical poles. The minibots race to the top of the pole to trigger a sensor, and earn additional bonus points.
Information provided by www.usfirst.org, the FIRST Organizations main website.
Summary of Competition
Our team had now grown to nearly 20 students with a good crop of freshman. The 2011 game, Logo Motion brought new challenges once again. We would need to place inflated game pieces in the shape of circles, triangles and squared (First logos) on multilevel horizontal bars as high as 9 feet off the floor. The bonus had a unique twist, to deploy a small minibot and let in rise independently on a pole. The team strategy was to perform well at all aspects of the game. This was a year for many “firsts”. We took our first dive into mechanum wheel drive that allowed us improved maneuverability. We used a sensor to guide us in autonomous. We designed an elevator system to raise a claw. We employed pneumatics to operate the claw. We turned the minibot design over to our freshmen team, which was also delivered pneumatically. We split into internal task teams and used the friendly rivalry to spur everyone along. We had an even snowier build season than 2010 and so once again worked on 2 official snow days. Late on our final build night we finally got all aspects of the robot to work and were ready for the competition.
At the greater Kansas City Regional, after a slow start the robot performed very well. We were able to hang a tube in autonomous, 3-5 in during the game and our freshmen minibot performed great. We really were a well-balanced robot and were rewarded by being picked the 4th seed team 1986 (Lee Summit, Mo West). Our alliance won the quarterfinals but lost close matches in semifinals to the eventual winning alliance. This was another close year that inspired us for 2012.
At the greater Kansas City Regional, after a slow start the robot performed very well. We were able to hang a tube in autonomous, 3-5 in during the game and our freshmen minibot performed great. We really were a well-balanced robot and were rewarded by being picked the 4th seed team 1986 (Lee Summit, Mo West). Our alliance won the quarterfinals but lost close matches in semifinals to the eventual winning alliance. This was another close year that inspired us for 2012.
Logo Motion ScoringYour team gets points depending on three different categories
Ubertubes are used during autonomous mode to score the following points.
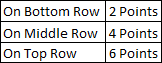
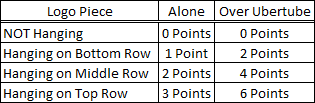
The Logo pieces earn points depending on which run the piece is hung upon.
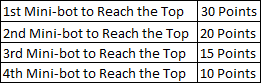
The end game is a race between four mini bots to reach the top of tower pole on the field.
|
Logo Motion Field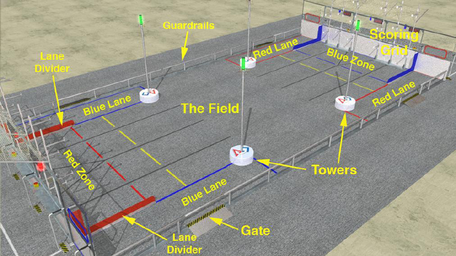
|
